Txinako kalitate handiko Mig soldadura robota altzairu herdoilgaitza soldatzeko







Robot Gorputza
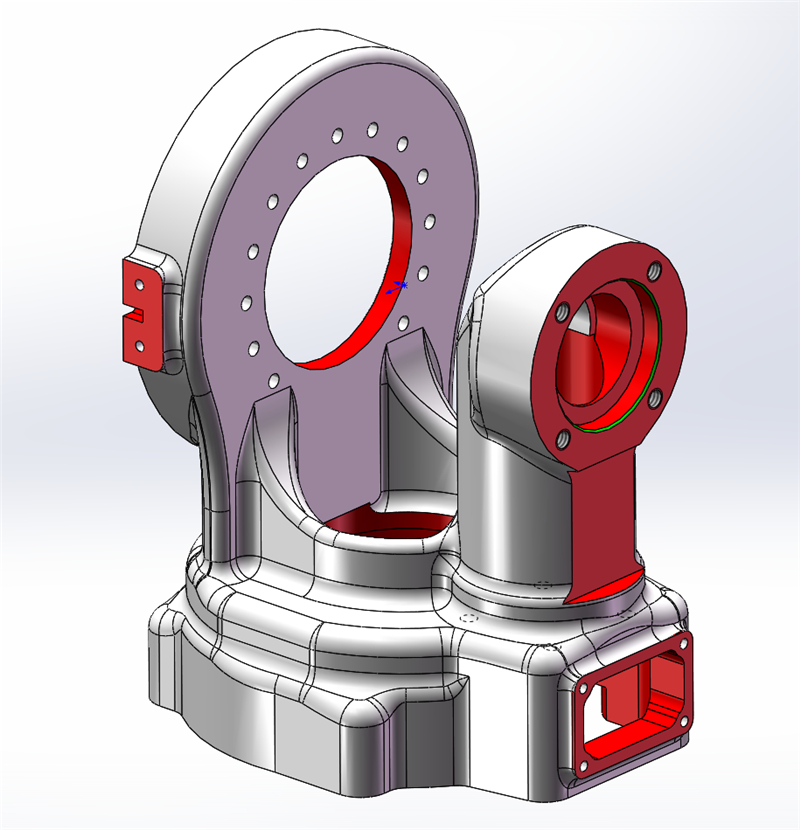
JHY robotak batez ere gorputzaren galdaketa prozesuan eta xehetasunen diseinuan aldatzen du. Gure I+G taldeak berrikuntza asko egin ditu robotaren gorputzaren diseinuan, hamar asmakizun patente berri baino gehiago dituelarik.
Adibidez, seigarren ardatzak transmisio-mekanismo zehatz bat garatu eta indartze-barrak diseinatu ditu, eta seigarren gurpileko irteera-diskoak engranajerik gabeko diseinua hartzen du, eta horrek robotaren zehaztasuna eta egonkortasuna asko hobetu ditu. Soldatzeko zuzi-lana posizio zailean funtzionatzen badu ere, egonkortasuna bermatzen du dardarka gabe. Puntu hau gure etxeko bezeroek berretsi dute.
Robotaren gorputza molde bidezko galdaketa teknologiaz ekoizten da, eta horrek dentsitate handiko eta arinagoak egiten ditu gure robotak. Aurreko besoa estuagoa eta luzeagoa izan daiteke, goiko besoaren eta aurreko besoaren arteko erlazioa urrezko proportzioaren antzekoagoa da, beraz, malguago eta azkarrago mugitzen da.
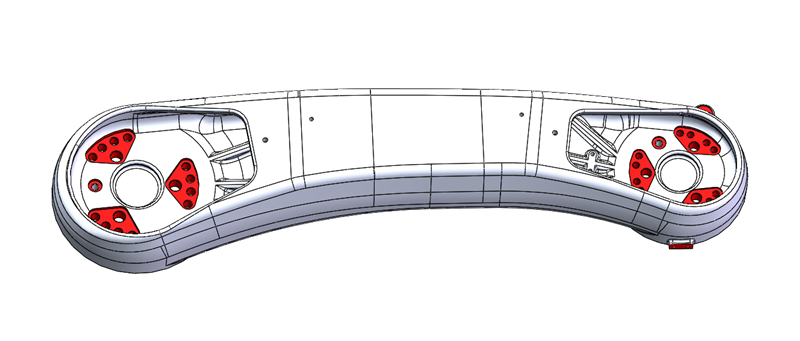
Eskema Diseinua
Robotaren beso zuzenaren diseinua sinpleagoa eta dotoreagoa da. Diseinu zentzuarekin, Europako merkatuaren estetikarekin bat dator gehiago. Robotaren gorputzaren diseinuak hainbat patente tekniko eskatu ditu, eta robotaren gorputz berria perfektuagoa da.
Kableen marka nagusia
Robotaren barneko kableak eta terminalak Japoniako marka nagusiek egin dituzte: DYEDEN, TAIYO, ABB eta Fanuc bezala.
Terminala: Yierma marka italiarra.
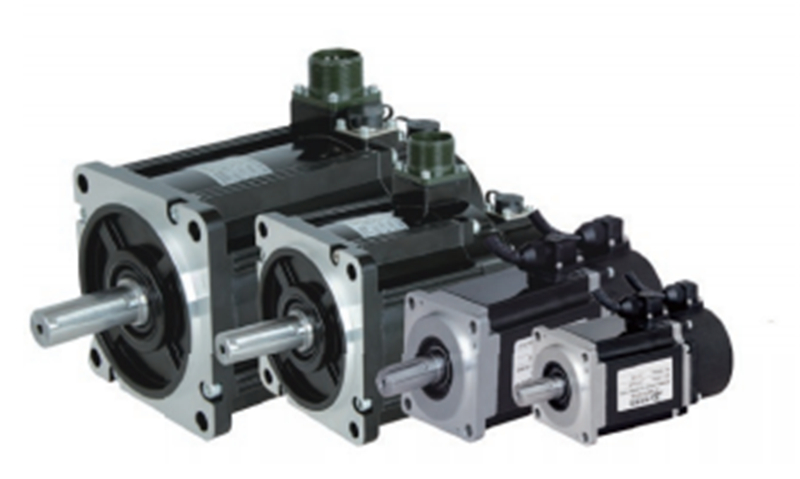
Servo Motor / Gidari / Erreduktoreen Marka Nagusiak
Guztiek Txinako marka nagusiak erabiltzen dituzte. Marka bakoitza denbora luzez probatu eta ikertu da azken erabakia hartu aurretik, marka horiek gure robotak erabiltzeko egokiak direla eta haien kalitatea eta errendimendua egonkorrak eta fidagarriak direla ziurtatzeko.
J1 eta J2 ardatzek hiru ardatz eszentrikoren diseinua hartzen dute, 65 Nm-ko momentuarekin, eta horrek engranajearen higadura murrizten du eta erreduktorearen bizitza erabilgarria handitzen du. JHY robotaren J1 eta J3 ardatzeko erreduktoreak dira gaur egun Txinako konfiguraziorik altuena.
Serbo motorrari buruz, orain gehienez 3kw-ko motorra erabiltzen dugu robotentzat.
1,8 m eta 2 m-ko robotentzat, 1. eta 2. ardatzetarako behar den indar eragilea handiagoa da, eta motorraren potentziaren eskakizunak ere handiagoak dira.
Zehaztasun handiko eta espezifikazio anitzeko motorrek gure robotaren aplikazioen eskaera guztiz ase dezakete.

3 urte/7500 orduko mantentze-lanik gabe
Mantentze-lanak sinpleak dira, bezeroek eurek erraz erabil ditzakete.
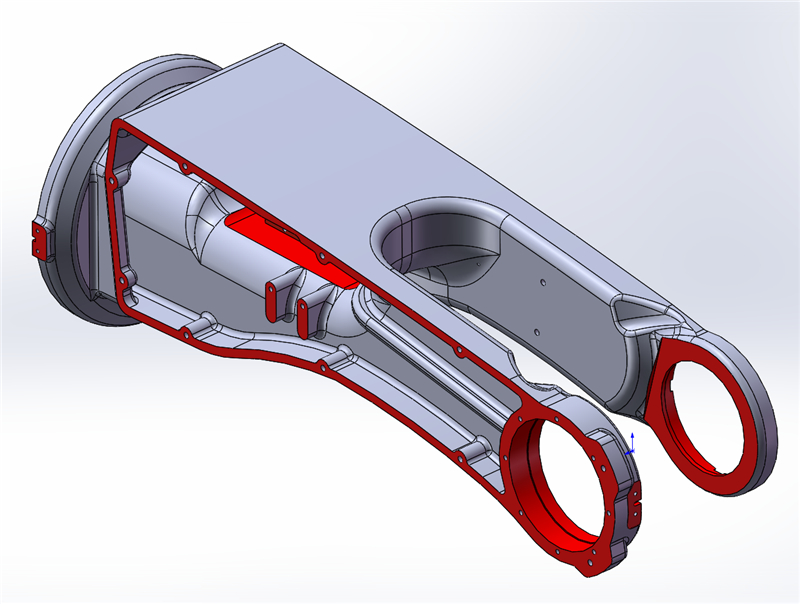
Beste patente eta diseinu batzuk
6 ardatzeko bigarren mailako transmisioa Bi uhal-konexiotara aldatu da, transmisio-erlazioa handitu da eta 6 ardatzak azkarregi eta zehaztugabe mugitzearen arazoa konpondu da. Seigarren ardatzeko irteera-diskoa engranajerik gabe diseinatuta dago, zehaztasun handiko transmisio-mekanismoarekin, eta horrek seigarren ardatzaren mugimenduaren zehaztasuna hobetzen du... Momentuz, 30 patente baino gehiago ditugu soldadura-robotarekin.
Bideoa
Parametroak
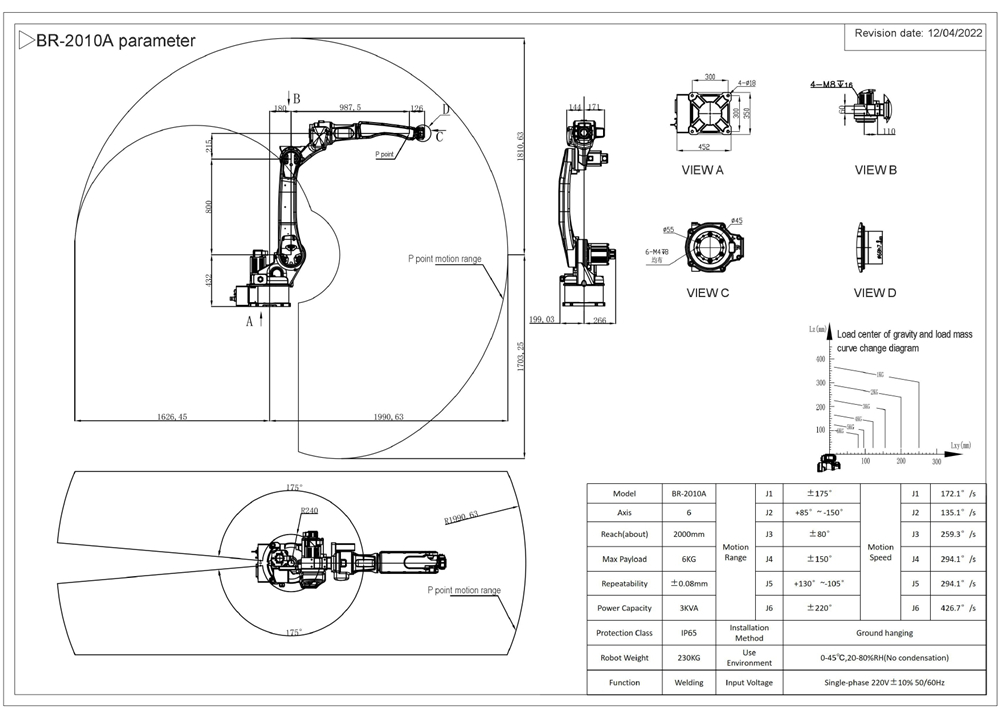
| Modeloa | BR-2010A | Mugimendu-eremua | J1 | ±175° | Mugimenduaren abiadura | J1 | 172,1°/s |
| Ardatza | 6 | J2 | +85°~ -150° | J2 | 135,1°/s | ||
| Iristea (buruz) | 2000 mm | J3 | ±80° | J3 | 259,3°/s | ||
| Gehienezko karga erabilgarria | 6 kg | J4 | ±150° | J4 | 294,1°/s | ||
| Errepikagarritasuna | ±0,08 mm | J5 | +130°~-105° | J5 | 294,1°/s | ||
| Potentzia-ahalmena | 3KVA | J6 | ±220° | J6 | 426,7°/s | ||
| Babes Klasea | IP65 | Instalazio metodoa | Lurrean zintzilik | ||||
| Robotaren pisua | 230 kg | Erabili ingurunea | 0-45 ℃, % 20-80 RH (kondentsaziorik gabe) | ||||
| Funtzioa | Soldadura | Sarrerako tentsioa | Fase bakarreko 220V±%10 50/60Hz | ||||
Produktuen kategoriak
-

6 ardatzeko zipriztin gutxiko MIG soldadura robotaren irismena 1800 mm
-

6 ardatzeko MIG MAG soldadura robota 1500 mm-ko gamarekin ...
-

Kalitate handiko soldadura-robotak altzariak soldatzeko erabiltzen dira
-

JHY 6 ardatzeko robot beso industriala arku automatikoko m ...
-

2000 mm-ko irismena duen soldadura-robot karbonozko metalak soldatzeko...
-

2000 mm-ko zabalera duen MIG soldadura robota altzairu herdoilgaitzerako...